|
iSpike
2.1
Spike conversion library for robotics
|
|
iSpike
2.1
Spike conversion library for robotics
|
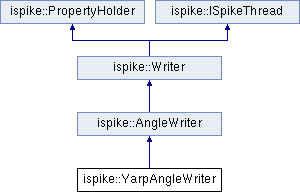
#include <YarpAngleWriter.hpp>
Public Member Functions | |
| YarpAngleWriter (string nameserverIP, unsigned nameserverPort) | |
| virtual | ~YarpAngleWriter () |
| void | initialize (map< string, Property > &properties) |
| void | setAngle (double newAngle) |
| void | setDegreeOfFreedom (int dof) |
| void | setProperties (map< string, Property > &properties) |
| void | start () |
Writes angles to YARP
Definition at line 15 of file YarpAngleWriter.hpp.
| YarpAngleWriter::YarpAngleWriter | ( | string | nameserverIP, |
| unsigned | nameserverPort | ||
| ) |
The default constructor, only initialises the default parameters and the description
Definition at line 18 of file YarpAngleWriter.cpp.
| YarpAngleWriter::~YarpAngleWriter | ( | ) | [virtual] |
Destructor
Definition at line 47 of file YarpAngleWriter.cpp.
| void YarpAngleWriter::initialize | ( | map< string, Property > & | properties | ) | [virtual] |
Implements ispike::Writer.
Definition at line 62 of file YarpAngleWriter.cpp.
| void YarpAngleWriter::setAngle | ( | double | angle | ) | [virtual] |
Sets the angle to be output
Implements ispike::AngleWriter.
Definition at line 69 of file YarpAngleWriter.cpp.
| void YarpAngleWriter::setDegreeOfFreedom | ( | int | dof | ) | [virtual] |
Sets the degree of freedom
Implements ispike::AngleWriter.
Definition at line 78 of file YarpAngleWriter.cpp.
| void YarpAngleWriter::setProperties | ( | map< string, Property > & | properties | ) | [virtual] |
Sets the properties
Implements ispike::PropertyHolder.
Definition at line 87 of file YarpAngleWriter.cpp.
| void YarpAngleWriter::start | ( | ) | [virtual] |
Initialises the channel and starts the conversion thread
Implements ispike::ISpikeThread.
Definition at line 93 of file YarpAngleWriter.cpp.
 1.7.6.1
1.7.6.1 
