|
iSpike
2.1
Spike conversion library for robotics
|
|
iSpike
2.1
Spike conversion library for robotics
|
#include <YarpAngleReader.hpp>
Public Member Functions | |
| YarpAngleReader (string nameserverIP, unsigned nameserverPort) | |
| ~YarpAngleReader () | |
| void | initialize (map< string, Property > &properties) |
| void | setProperties (map< string, Property > &properties) |
| void | start () |
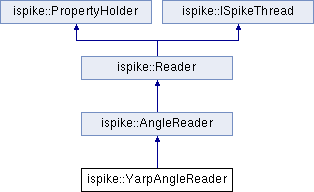
Retrieves a vector of joint angles from a given yarp port and makes it available upon request
Definition at line 14 of file YarpAngleReader.hpp.
| YarpAngleReader::YarpAngleReader | ( | string | nameserverIP, |
| unsigned | nameserverPort | ||
| ) |
Constructor
Definition at line 21 of file YarpAngleReader.cpp.
Destructor
Definition at line 49 of file YarpAngleReader.cpp.
| void YarpAngleReader::initialize | ( | map< string, Property > & | properties | ) | [virtual] |
Implements ispike::Reader.
Definition at line 65 of file YarpAngleReader.cpp.
| void YarpAngleReader::setProperties | ( | map< string, Property > & | properties | ) | [virtual] |
Sets the properties
Implements ispike::PropertyHolder.
Definition at line 73 of file YarpAngleReader.cpp.
| void YarpAngleReader::start | ( | ) | [virtual] |
Initialises the channel and starts the conversion thread
Implements ispike::ISpikeThread.
Definition at line 79 of file YarpAngleReader.cpp.
 1.7.6.1
1.7.6.1 
