|
iSpike
2.1
Spike conversion library for robotics
|
|
iSpike
2.1
Spike conversion library for robotics
|
#include <AngleReader.hpp>
Public Member Functions | |
| AngleReader () | |
| virtual | ~AngleReader () |
| double | getAngle () |
| void | setDegreeOfFreedom (unsigned dof) |
| void | setAngle (double angle) |
Protected Attributes | |
| double | angle |
| unsigned | degreeOfFreedom |
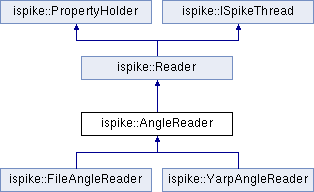
AngleReader continuously fetches and retrieves joint angles upon request
Definition at line 9 of file AngleReader.hpp.
| ispike::AngleReader::AngleReader | ( | ) | [inline] |
Definition at line 11 of file AngleReader.hpp.
| virtual ispike::AngleReader::~AngleReader | ( | ) | [inline, virtual] |
Definition at line 12 of file AngleReader.hpp.
| double ispike::AngleReader::getAngle | ( | ) | [inline] |
Retrieves the angle
Definition at line 15 of file AngleReader.hpp.
| void ispike::AngleReader::setAngle | ( | double | angle | ) | [inline] |
Sets the angle
Definition at line 21 of file AngleReader.hpp.
| void ispike::AngleReader::setDegreeOfFreedom | ( | unsigned | dof | ) | [inline] |
Sets the degree of freedom
Definition at line 18 of file AngleReader.hpp.
double ispike::AngleReader::angle [protected] |
The angle that is read by the reader
Definition at line 26 of file AngleReader.hpp.
unsigned ispike::AngleReader::degreeOfFreedom [protected] |
Degree of freedom of the joint
Definition at line 29 of file AngleReader.hpp.
 1.7.6.1
1.7.6.1 
